http://bardiem2.ucoz.ru/Vremenna2020ya_model.docx
http://bardiem2.ucoz.ru/Vremennaya_model_1.docx http://bardiem2.ucoz.ru/Vremennaya_model_2.docx
Трёхмерная временная модель
Рассмотрим существование организационных систем, используя трёхмерную временную модель, см. Рис.1
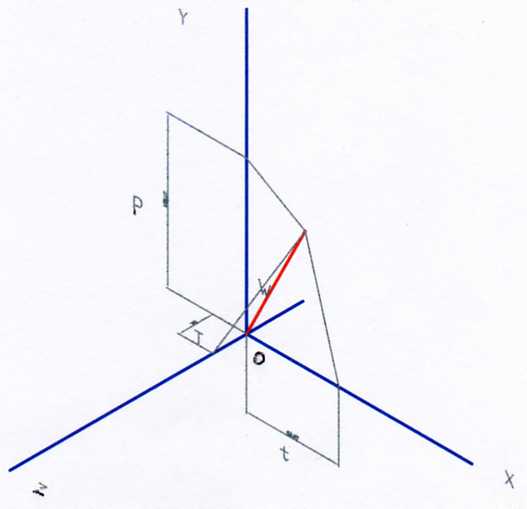
Существование организационной системы представлено вектором в трёхмерном временном пространстве. По трём осям откладываются независимые друг от друга : по оси y потери времени P; по оси x - затраты времени t на выполнение функций по целевому назначению ; по оси z - ресурс жизни системы T.
Как видно из Рис.1 векторы могут располагаться в любом из восьми трёхмерных пространств: 1) t1 – T1– P1; 2) t2 – Т2 – -P2 ; 3) -t3 – Т3 – -P3 ; 4) -t4 – Т4 – P4; 5) t5 – -Т5 – P5; 6) t6 – -Т6 – -P6; 7) -t7 – -Т7 – -P7; 8) -t8 – -Т8 – P8.
Если P1.,2,3,4,5,6,7,8 = 0, то это соответствует идеальным, не существующим в реальности случаям организационных систем.
Если t1,2,3,4,5,6,7,8 = 0, то организационные системы существуют только «для себя» и не могут рассматриваться как системы целевого назначения.
Если T1,2,3,4,5,6,7,8 = 0, то организационные системы погибают, истратив собственные ресурсы.
Итак, организационные системы могут существовать только при не нулевых значениях ресурсов, потерь времени и целевых затрат времени.
В первом пространстве величина вектора организационной системы равна:
_____________
W1 = √ T12 + P12 + t12 = Const. (1)
Величина вектора W1 принимается постоянной или медленно изменяющейся за время выполнения операции.
С увеличением P1 , t1 вектор W1* вращается вокруг точки О от плоскости Z – O –Y до плоскости Y – O – Х. Как видно из (1) вращение занимает максимальное время при P1 = min. При этом начальное положение вектора ( t1= 0,) на плоскости Z – O –Y.
Организационная система обладает свойством восстановления и увеличения ресурса , а также уменьшения затрат времени на выполнение операций путём выполнения следующих действий:
1) затрата ресурса –δТ1, при этом затраты времени на выполнение действия увеличиваются на +δt1,
___________________________
δt1= t1 - √ t12 -(N1/L1)δТ1((N1/L1)δТ1+2Т1) (2),
где: L1 - общее число индивидов, образующих систему с вектором W1*,
N1 - число индивидов, участвующих в выполнении действия с временем δt1 ;
2) в результате выполнения действия Т1 может увеличиваться на +ΔТ1 которое больше или меньше δТ1, т. е. операция может быть как прибыльной, так и убыточной.
Если операция прибыльная, то затраты времени δt1 компенсируются, в соответствии с (1), вплоть до увеличения ресурса Т1 и уменьшения P1 на - δP1;
если операция убыточная, то остаток ΔδТ1 увеличивает P1 на +δP1., а ресурс Т1 уменьшается.
Характеристикой эффективности операции может служить отношение: Е1= ΔТ1/ δТ1 (3);
3) если целью действия является уменьшение затрат времени δt1 на выполнение какой либо операции, то в результате выполнения действия, требующего затрат δt1н, δt1 уменьшается для этой операции на - Δδt1, так что в последующем выполнении этой операции потребуется меньше затрат ресурса, а в конечном итоге это приводит к восстановлению и увеличению ресурса Т1,
характеристика эффективности операции в этом случае Э1 = δt1 / ( δt1 - Δδt1 ) (4).
Подобные операции система с вектором W1* производит как для сохранения и повышения собственного ресурса и повышения эффективности собственного функционирования, так и для сохранения и улучшения «своих» подсистем, расположенных в левой полусфере (пространства с векторами: W2*, W3*, W4* ).
Примером организационной системы в первом пространстве является государственные власть и жизнеобеспечение страны: государственный аппарат чиновников, органы правопорядка, вооружённые силы страны, группы индивидов, занятых в государственных: производстве и сбыте (промышленном и сельскохозяйственном), энергетике, добыче полезных ископаемых, здравоохранении, образовании, науке, культуре, транспорте, связи, государственных СМИ и банках и т. п.
В первом пространстве одновременно выполняется множество действий, но если P1 и t1 полностью заменяют Т1 =0 , вектор W1* попадает в плоскость X – O – Y , и государственная власть меняется.
Второе пространство с отрицательным P2 и положительным Т2. Величина собственного вектора во втором пространстве W2 соответствует (1), если индексы 1 заменить на 2.
С увеличением |P2|, t2 вектор W2* вращается вокруг точки О от плоскости Z – O – -Y до плоскости -Y – O – Х.
Как видно из (1) вращение занимает максимальное время при P2 = min. При этом начальное положение вектора (t2=0, ), на плоскости Z – O – -Y.
Организационная система с вектором W2* также обладает свойством восстановления ресурса и повышения эффективности функционирования, как и система с вектором W1*.
Система с вектором W2* погибает, когда Т2=0 , а вектор W2* попадает в плоскость X – O – -Y .
Продолжение см. предыдущую страницу "Временные модели".
|